Chapter 3: Rigid Body Basics
In this chapter, you will learn some fundamental tools for rigid bodies, what I call the rigid body basics. Recall, rigid bodies have mass and a particular shape or size. Here are the sections in this Chapter:
- 3.1 Right Hand Rule – a way to help you make accurate coordinate frames
- 3.2 Couples – rotational motion created from two forces
- 3.3 Distributed Loads – a way to express a force over a certain area
- 3.4 Reactions & Supports – how to model the constraints that keep an object in place
- 3.5 Indeterminate Loads – how to determine if there are too many forces
- 3.6 Examples – examples from your peers
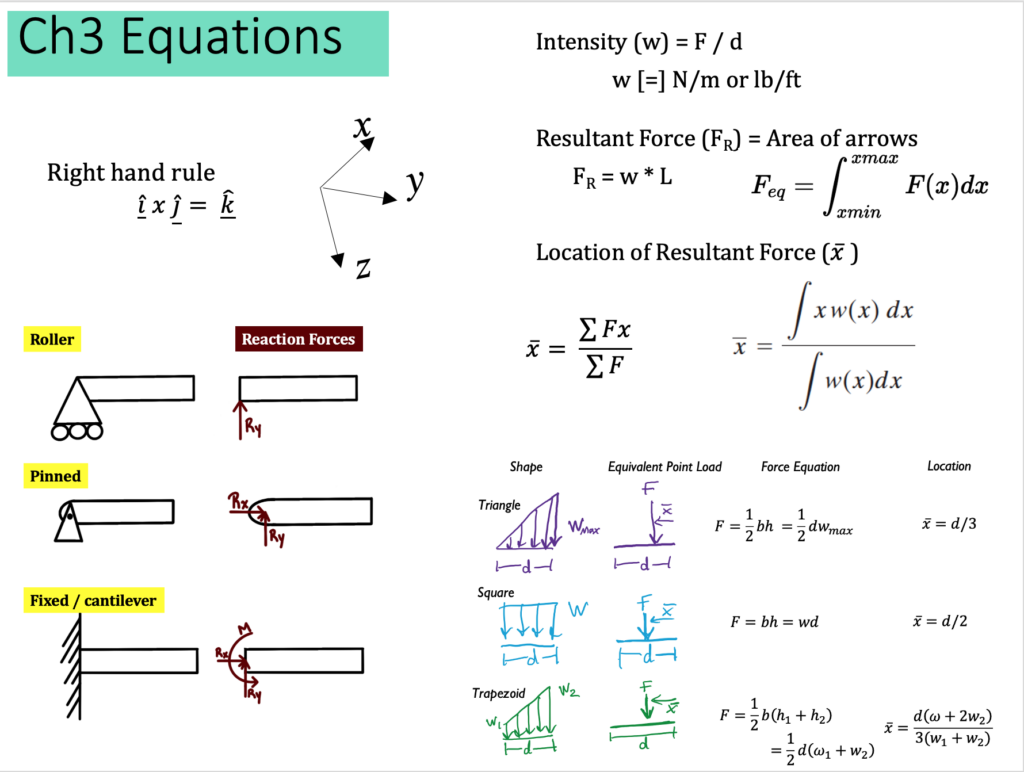
Here are the important equations for this chapter.